图1 坐标测量机(CMM)示例 初代CMM由花岗岩平台、精密光栅尺、运动控制系统等部件组成,精度可达到1~3um级别,但是它对环境温度的要求较高,且特别笨重。人们为了测量更加便捷,之后又发明了关节臂CMM、激光CMM、视觉CMM三个品类的坐标测量机。 关节臂CMM是由六轴或七轴关节组成,在关节处有高精度旋转编码器可测量关节的角度,精度可达到20~50um级别,重量较轻,对环境温度的要求不像三坐标那么高。但它的测量范围受限于机械臂的臂长,臂越长精度越低。

激光CMM是指激光跟踪仪,由激光干涉测距模块、高精度旋转编码器、运动控制模块、全反射靶球等组成,高端设备甚至还集成了视觉定姿模块,精度可达到15um+6um/m,测量范围可达100m左右。

视觉CMM主要由高分辨率相机和光笔组成,其中相机用于跟踪定位,而光笔又由标志点、探针组成。这类设备的重量最轻,使用时最为灵活省力,精度通常能达到20~50um级别。视觉CMM的分类、发展和应用,将在下文中详述。

二、视觉CMM的发展 视觉CMM是基于数字摄影测量和计算机视觉原理的坐标测量仪器,该领域的学者把相机抽象成一个小孔成像设备,利用“共线方程”这一基本原理,推导出了相机标定、前方交会、后方交会、相对定向、绝对定向、极线对应等解析法理论,表述的是“物-像”几何关系。 在视觉CMM中,被观测的目标(光笔)通常是一组标志点,可以是玻璃微珠反光材料的,也可以是LED自发光的,从原理上标志点的数量至少应为3个,但为了更好的精度和可靠性,厂家通常会设计10个左右的标志点。标志点的三维坐标是事先测定过的已知值,相机对标志点进行拍照,得到标志点的成像,利用“物-像”几何关系求解被观测目标(光笔)的位置和姿态。 视觉CMM根据相机的数量和使用方式的不同,可以分为单目跟踪CMM、双目跟踪CMM、单目反向定位CMM、单目主动跟踪CMM四种类型,下文逐一介绍。
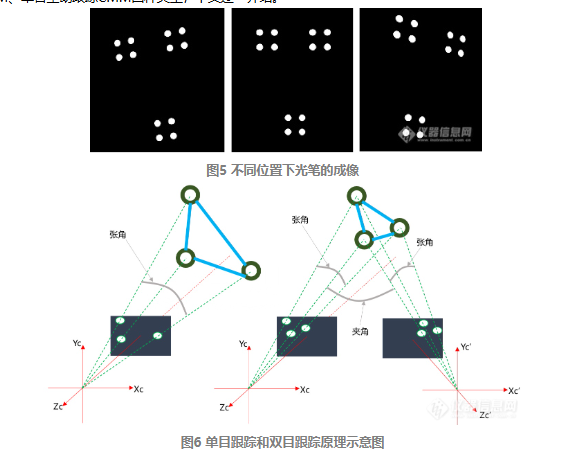
2.1 单目跟踪CMM 单目CMM是利用单个相机对被观测目标(光笔)进行跟踪定位,其原理在摄影测量中称为单片空间后方交会,测量精度与相机分辨率、拍摄距离远近、目标的尺寸大小等因素有关。为了保证足够的测量精度,如图6所示,被跟踪的目标张角需要足够大,因此其配套使用的光笔的尺寸一般都很大(图7)。
2.2 双目跟踪CMM 双目CMM是利用两个相机对被观测目标(光笔)进行跟踪定位,其原理在摄影测量中称为前方交会和绝对定向。虽然市面上也有三个相机以上的跟踪系统,但其原理等同于两个相机。如图6所示,双目CMM不需要大的张角,它只需要较大的夹角,因此其配套的光笔尺寸可以比较小,更加有利于手持使用。
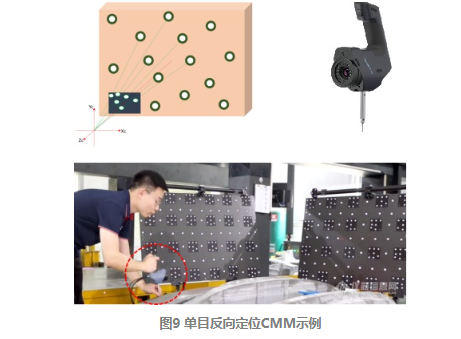
2.3 单目反向定位CMM 单目反向定位CMM的跟踪原理与单目跟踪CMM类似,但是其探针的安装位置是在相机上,而不是在被测目标(标志点载体)上。这样做的优势是,标志点载体不需要移动,可以把它做的非常大,并且可以把标志点的数量做的非常多,来提升跟踪定位的精度。标志点数量增多对软件的计算能力要求也更高,这是一种新颖的CMM设备。在国内由中观最早提出了这一独创性的产品设计,并诞生了代表性产品——MarvelProbe便携式反向定位CMM,它可以借助固定墙体或便携支架上的标志点,灵活进行反向定位,实现接触式测量功能,同时还兼具独立的摄影测量功能。
2.4 单目主动跟踪CMM 单目主动跟踪CMM,是指相机是活动的,它的相机视场角非常小,且相机会在电机的带动下主动跟踪目标的位置。它不同于激光跟踪仪的特征是没有激光反射靶球。
三、视觉CMM的应用 视觉CMM的特点是轻便灵活,测量范围较大,精度可满足亚毫米级别的需求,在诸如汽车制造、骨科手术等领域有较为广泛的应用。另外,视觉CMM单点测量的精度较高,结合三维扫描仪配套使用,可以提升三维扫描的基准对齐精度,这种做法在三维检测中也较为常见。 3.1 汽车制造 在汽车制造的装配环节之前,对孔、槽、形面以及缝隙等特征进行检测,是保证顺利装配的前提。
3.2 骨科手术 传统的骨科手术靠医生的主观判断来确定操刀的位置,而现代手术机器人依靠双目跟踪CMM来实现对骨骼、手术器械的精准定位,降低手术风险。
3.3 结合三维扫描使用 三维扫描可以获得形面特征的高密度连续的三维数据,但是对一些边界特征(如孔槽)难以实现完整、精确的测量。而视觉CMM恰好适合对关键特征进行高精度测量。
四、结语 视觉CMM的优缺点是较为明显的,其优点是手持端的重量较轻,操作更为灵活,测量范围也较大,不受机械运动范围的限制,对环境的要求也较低,另外,视觉CMM的价格通常也较低。其缺点是测量精度不如三坐标和激光跟踪仪,在未来随着相机分辨率的不断提升,视觉CMM的精度还有一定的改进空间。
声明:文章来源于仪器信息网,旨在分享若涉及版权问题,请及时与我司联系,我们将快速处理。